
Introduction to Line Scan Cameras

Fundamentals:
Function and Applications
Setting up a Line Scan Camera System
Choosing the right Camera Interface
What are Line Scan Cameras?
Line scan cameras are semiconductor cameras used in many industrial environments. The single photosensitive line sensor contains – depending on type – up to 22800 picture elements (pixels). Light energy incident on the sensor is transformed into an electric signal for digitization within the camera.
At 8-bit resolution, the A/D converter transmits the output voltage of each pixel into one of 256 brightness levels, at 12-bit resolution into 4096 brightness levels.
Color line scan cameras provide three separate line signals for Red, Green and Blue with either 3 x 8-bit or 3 x 12-bit per pixel. The digitized output signal is transfered to a computer via various interfaces according to requirements, e.g. Gigabit Ethernet or USB 3.0.
The advantages of a line scan camera include
- high optical resolution of up to 8160 pixels (monochrome) or 3 x 7600 pixels (color RGB)
- high speed of up to 54 kHz line frequency
- flexible parameter setting for the line scans
- synchronizing of each individual line, as well as the triggering of frames
- when focused on the zenith of cylindrical objects, the line scan camera delivers sharp, distortion-free images of the external surface during rotation
- flexible image height from 1 up to 64000 lines per image
- continuous scanning of endless materials such as foils or paper without a time limit.
Creating an image
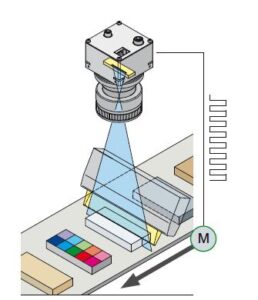
The image produced by a line scan camera is one-dimensional and represents the brightness profile of an object, captured at the current position of the line sensor. A two-dimensional image is generated byperforming a scanning movement of either the object or the camera, during which the individual line signals are transferred to the computer and assembled one by one into a 2D image.
Improving the image
High image quality can only be achieved with the appropriate combination of line scan camera, high resolution lens, appropriate lighting and a precise motor unit, whether rotary or linear drive or a conveyer belt. For an image to be correct in all proportions, the scanning speed and the image acquisition process must be highly synchronized and this is most easily achieved by adjusting thetransport speed to the line frequency of the camera. However, in practice, it is usually the transport speed and the image resolution that are constraining and these predefine the line frequency and ultimate choice of line camera.
At constant transport speeds, such as when examining objects on a conveyor belt, a line scan camera can be allowed to operate in a free‑running mode. Where there are velocity fluctuations or discordant movements then external triggering of the line scan camera is required. The trigger pulses, e.g. from an encoder, are equidistant and independent of the movement velocity so that the camera will be triggered after a constant travelled distance.
This precise synchronization guarantees images with a reproducible resolution and correct aspect ratio.
The line frequency fL can be calculated for a given object speed vo and field width FOV, sensor length S and pixel width w from
(1)
The production of a 2D image requires precise synchronization of the line camera sensor and the speed of transport of the object.
Line Scan Camera Applications
Generally, the applications can be grouped into one-dimensional or two-dimensional measuring tasks.
For one-dimensional applications, the measured result is extracted from the pixel information of an individual line scan. Measurements of two-dimensional images require moving either the object or the line sensor.
Camera Application:
1-dimensional
- Signal generation: individual line scan
- Examples: measurement of width, rod diameter, edge positions, glass thickness.
2-dimensional
- Several line scans are combined to produce a 2D image (frame)
- Examples: surface inspection, endless webbing inspection, texture analysis, scanning.